
Overview
Cos’è un sistema RTLS?
I Real Time Locations Systems sono utilizzati per identificare e tracciare la posizione di oggetti in tempo reale, usando nodi mobili (Tags) posizionati sugli oggetti stessi e dispositivi fissi (Readers).
La comunicazione tra tags e readers consente il calcolo della posizione dei primi e la successiva comunicazione ai sistemi centralizzati della locazione.
RT SmartFinder (La tecnologia)
RT-SmartFinder è basato su una piattaforma wireless ZigBee™/ IEEE 802.15.4 e lavora con la classica frequenza 2.4 GHz.
Alcuni TAGs (Blind Node) sono posizionati su oggetti, persone, e veicoli, per tracciarne gli spostamenti e conoscerne la posizione attuale in tempo reale.
Altri TAGs (Reference Node) sono posizionati in zone con coordinate conosciute. Questi permettono ai Blind Nodes di ottenere la posizione reale e trasferirla al DataBase Aziendale.
Obiettivi raggiungibili
- Riduzione o annullamento dei tempi di ricerca degli assets
- Monitoraggio in Real Time dei movimenti
- Tracking delle missioni di prelievo nei magazzini
- Statistiche sull utilizzo di veicoli/assets/tools
- Rilevazione presenza in zone indesiderate
Software
Basic Engine
Rappresenta il motore di localizzazione e consente ai tags di comunicare con il server e di aggiornare il DB:
In particolare si occupa di:
- Comunicare con i Tags
- Consolidare le informazioni
- Comunicare ai client le informazioni in tempo reale mediante messaggi TCP.
- Gestire i trigger relativi agli allarmi (ingressi in zone indesiderate, batterie scariche, altri eventi da analizzare) e inviare le informazioni ai client (client PC, telefoni cellulari mediante SMS, email)
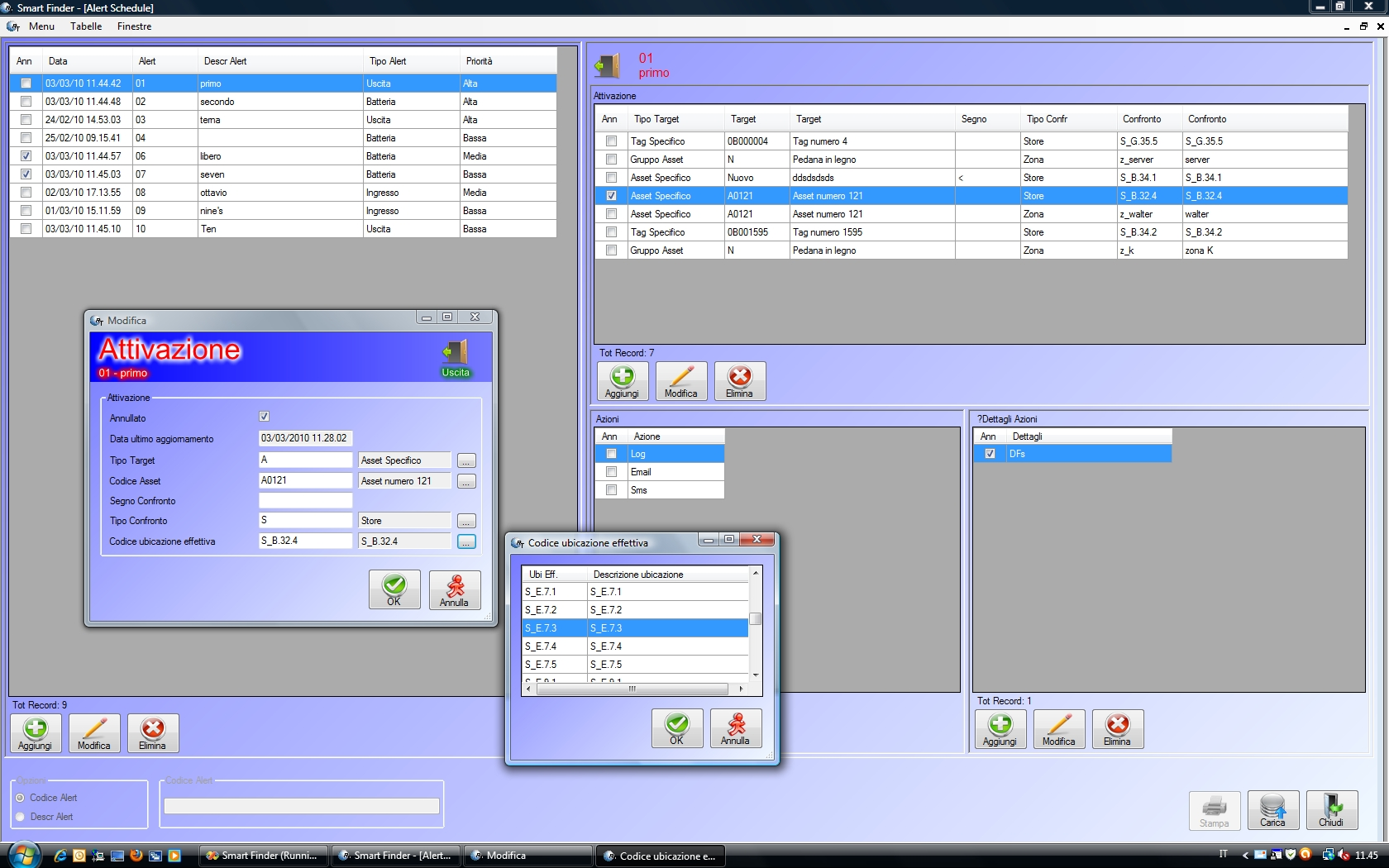
Locator Basic
- E’il tool di configurazione che permette le seguenti funzioni:
- Inserimento delle aree/zone nel DB mediante il caricamento di mappe in scala
- Inserimento dei Tag, degli assets e delle persone, associazione dei tag ad assets/persone.
- Inserimento degli allarmi
Real Time Viewer
Rappresenta la suite di funzioni client che consentono sia la visualizzazione in tempo reale che l'analisi a consuntivo dei dati accumulati mediante il basic engine. Vengono rilasciati all'utente dei programmi/funzioni standard per la consultazione di questi dati.
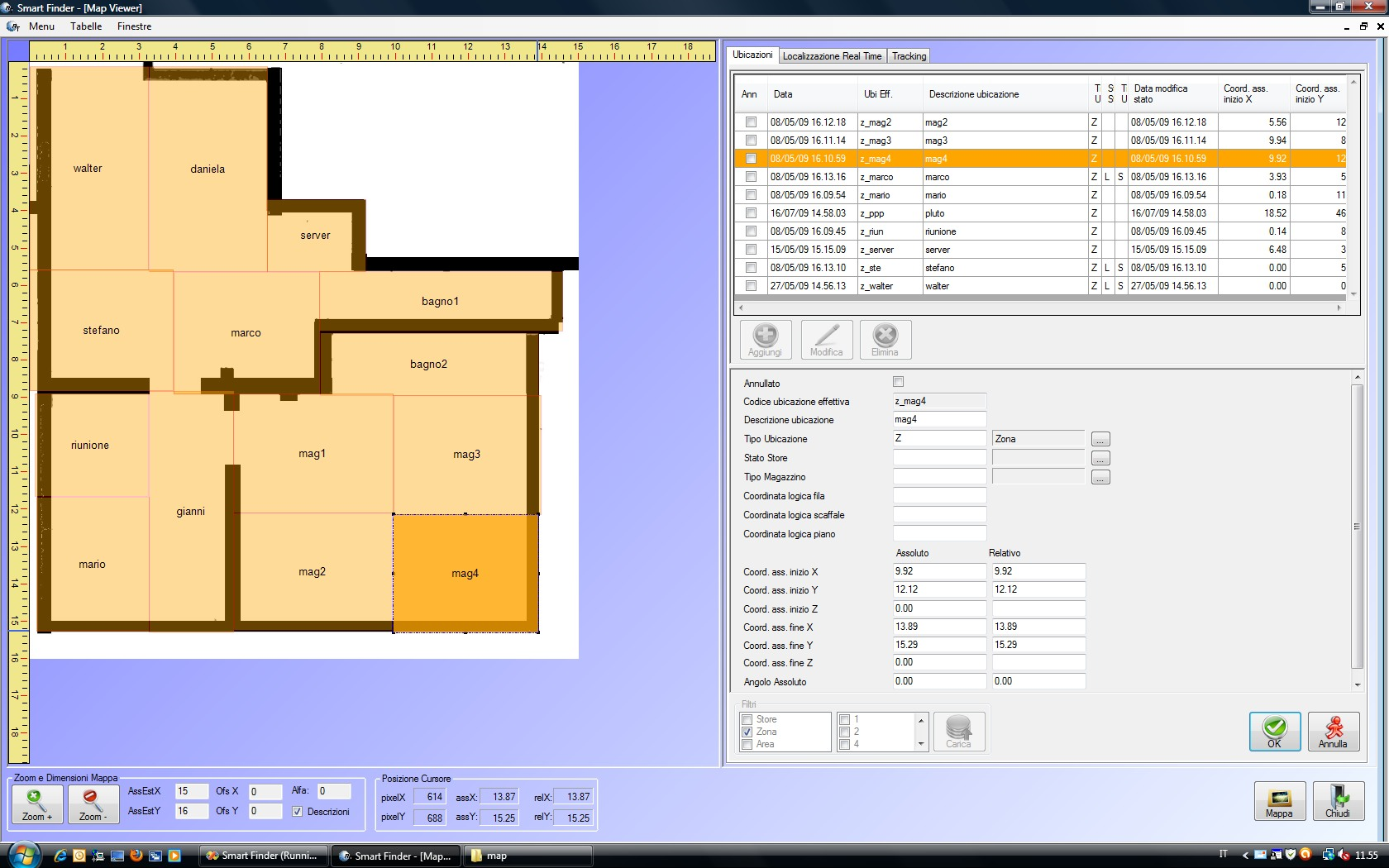
Generatore di Mappe
Permette di caricare dei bitmap (le varie mappe aziendali) e di gestirle mediante zoom mantenendo le proporzioni con le coordinate spaziali. Tutte le mappe e le modifiche effettuate sono salvate come lay-out. I lay-out potranno poi essere caricati dagli altri programmi di consultazione per essere utilizzati per le visualizzazioni necessarie.
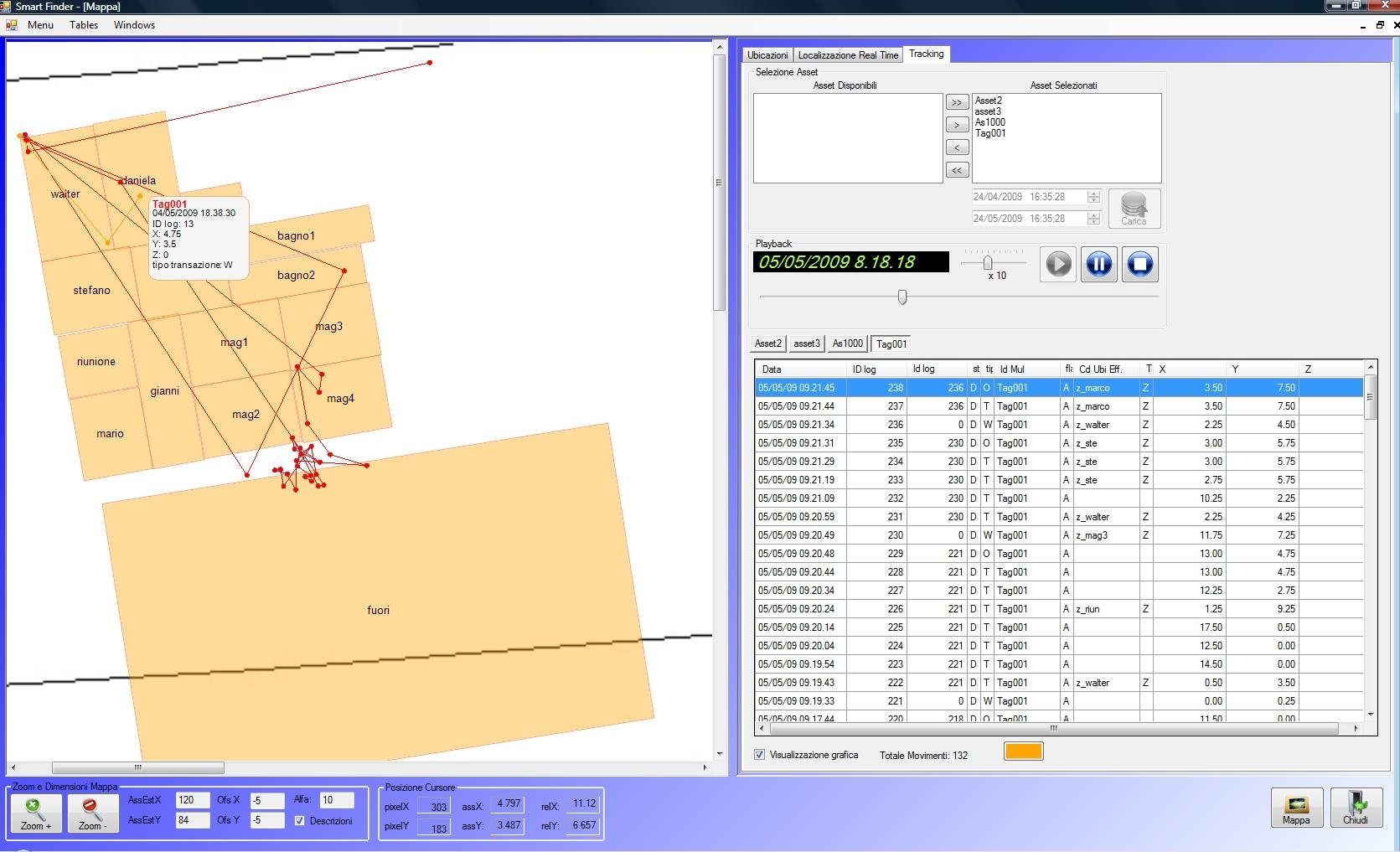
Assets Viewer
Permette di vedere in tempo reale gli spostamenti degli assets desiderati. Tramite i filtri si può selezionare quali Tag visualizzare, scegliendo il singolo Tag, un insieme dalla lista totale, una categoria (tutte le persone, tutti i muletti, tutti i dispositivi di una determinata macro-famiglia). Analizza lo storico degli spostamenti da data a data, con apposito fattore di suddivisione del tempo e con appositi filtri per far conoscere tutti i movimenti effettuati.